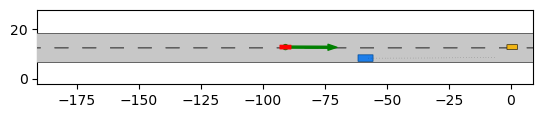
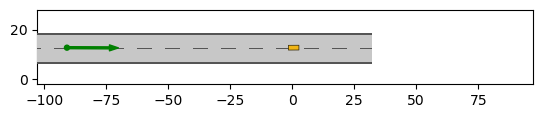
When I check this scenario, I found the ego vehicle is always in the initial state and did not move from the begining scenario to the end scenario. I show you the first scenario and the last scenario:
BTW, I use BMW_320i as the vehicle_type and PM as the vehicle_model.
So do you have any idea with this problem.
Yours
Beyond
The green arrow only shows the initial state of the planning problem in this scenario. The red rectangle is the ego vehicle. In your example, the ego vehicle disappears at the last time step. Do you have plots for intermediate time steps where the ego vehicle stays at the initial position?
Thanks for your reply. Now I know the green arrow shows the initial state.
For your question, the answer is NO. The red rectangle had disappeared since the second time step. So maybe the ego vehicle moved and had reached the goal, but it was not plotted in the scenario by the commonroad_rl.evaluate_model function. That is my supposition. Do you have any idea about it?
There was a bug of the rendering of the ego vehicle. I pushed the fix here. Please pull and re-run the evaluation for this scenario.
In general, the visualization stops if the episode is terminated, e.g., if goal is reached. Therefore, the disappearing ego vehicle did not mean that goal is reached.