After I evaluated some scenarios I’ve found that some scenarios have very unrealistic goals stored in their XML files, which results in the MotionPlanner never finds the solution even if the vehicle is already at goal state.
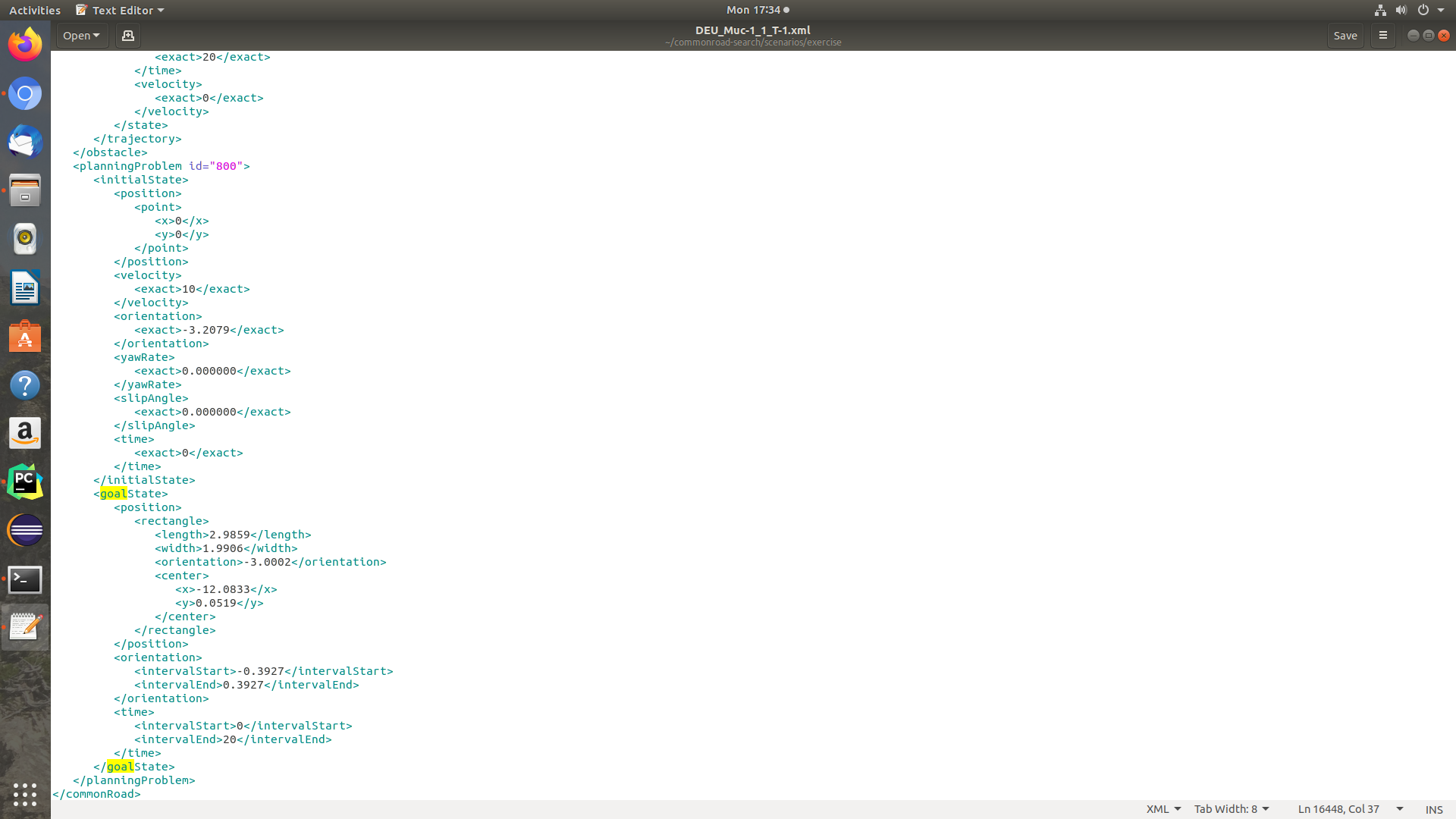
One example is DEU_Muc-1_1_T-1.xml. As shown in the attached XML file screenshot. The desired orientation is between -0.3 between and 0.3, where the goal position actually faces at -3 direction(or -180 grad direction).
Hi,
Thanks for the feedback, we will look into it.