Regarding to Exercise 4: Plan the motion of the ego vehicle in: https://commonroad.in.tum.de/tutorials/optimization-solution
What are the types of those constraints: constr and tiConstraints?
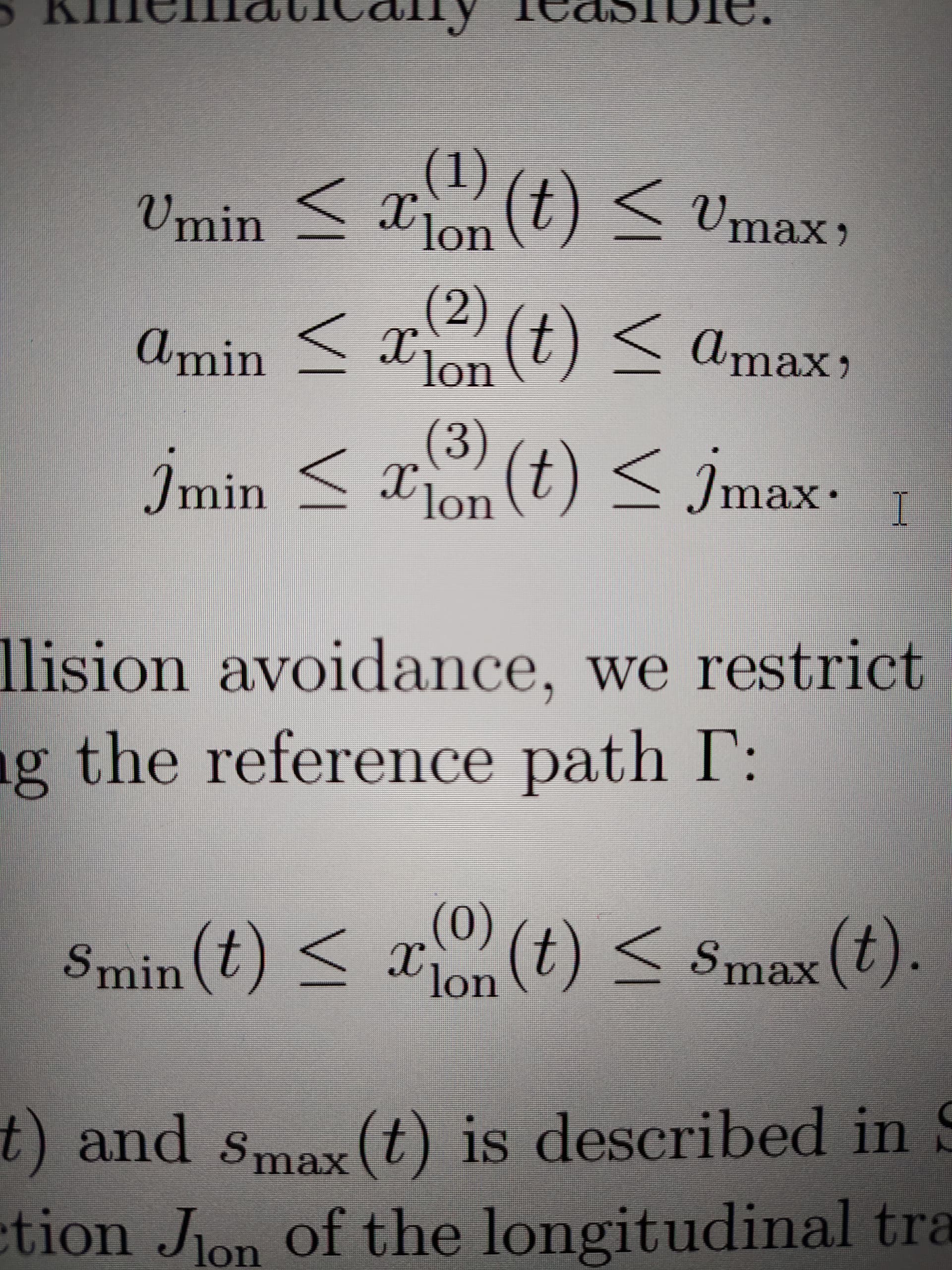
Are they inequality constraints or boundaries (upper and lower limits)?