I’m receiving strange behavior of the SUMO vehicles during the simulation of interactive scenarios (even without any ego vehicle). I am using commonroad 2021.1 and sumocr 2021.1 and the latest interactive scenarios from commonroad-scenarios repository.
I have tested with few of these scenarios, it seems that there were some errors in the conversion (generating routes for vehicles), which resulted in having vehicles slowing down and blocking other vehicles. Thanks for the feedback, we have created an issue for that.
I have by the way also encountered some problems with the collision check.
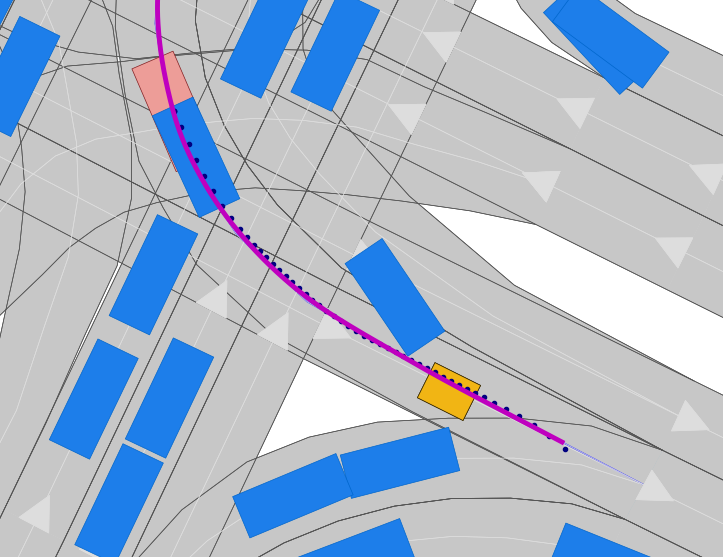
Based on the collide() function from commonroad driveability checker, I received that the following trajectory is collision free (clearly not the case):
The drivability checker is independent of the interactive scenarios, i.e., one can register the scenario and check for collision. Have you registered the newly simulated scenarios to the drivability checker? Here you find some guide.
I am currently using the Greedy-Best-First Search algorithm from commonroad with route planning information as heuristic. In the current state, I always “re-initialize” the whole Motion Planner class for every SUMO simulation step and let the algorithm re-search for the new path so I guessed, the collision checker should work fine. There also are collisions during the search but only with the road boundaries, never with any traffic agents. But I will take a deeper look at the driveability and collision checking inside my pipeline. Thanks.
After debugging of the collision checker with interactive scenarios, it seems that the check is not working with dynamic obstacles without predicted trajectory. As soon as I converted all the vehicle in the current SUMO time step to static obstacles, the collision check works fine.
The current drivability checker converts dynamic obstacles into time variant objects (different from the way it handles static obstacles). Thanks for reporting on that, I will forward to my colleague to have a closer look.
The collision checker does what it’s supposed to do:
When there is only the initial time step provided for dynamic obstacles, it cannot check for collisions of time steps beyond that. When it’s converted to a static obstacle, the vehicles remain at the initial state for all times (which is certainly not what you want).
The interactive scenarios require you to implement or use an existing prediction module for dynamic obstacles. The collision checker can check for collisions with these predictions. However, we have not published such a tool for predictions yet.