Hi,
I’m using GBFS as search algorithm and I made some changes in the heuristic.
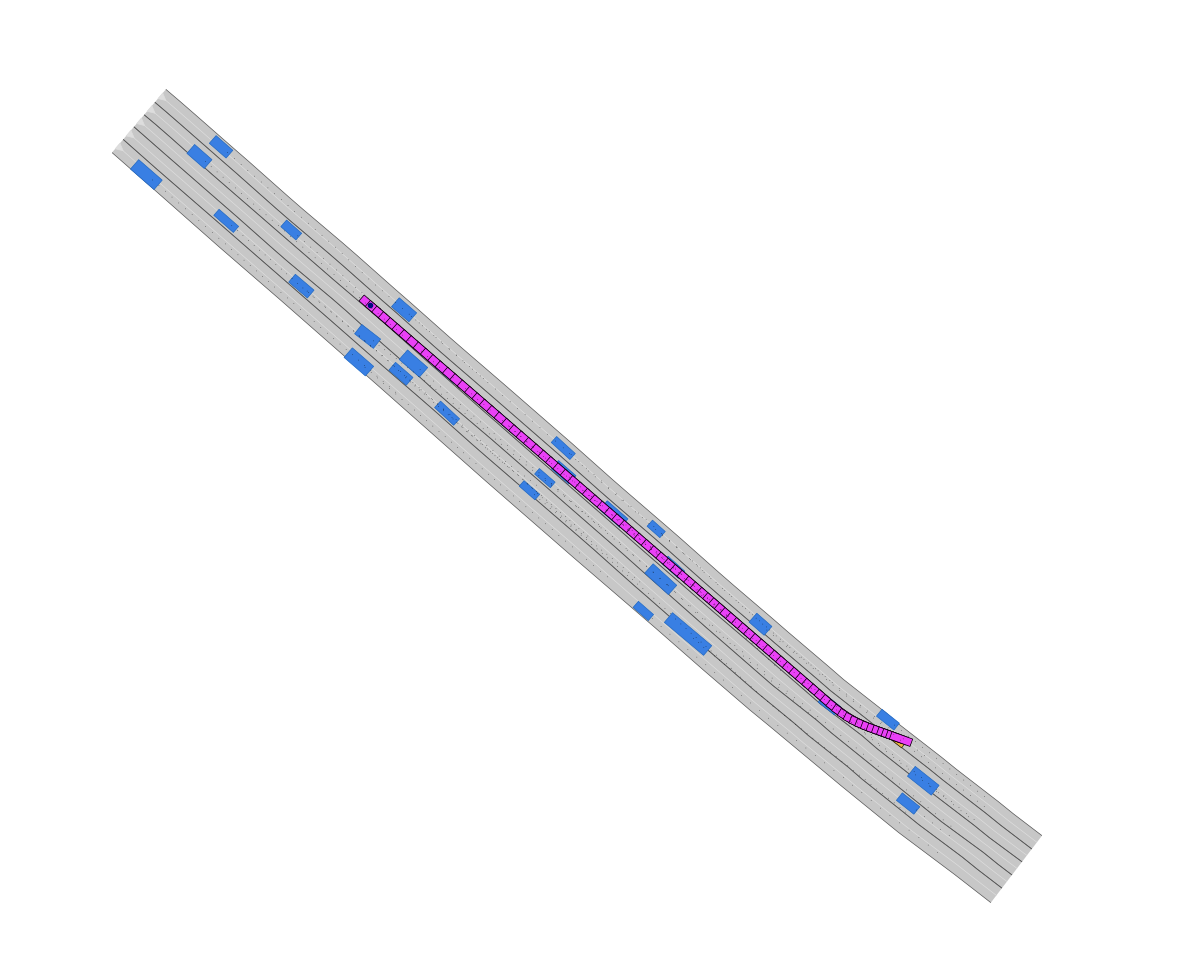
I’m facing the problem that the car successfully finds the road up until it reaches the final goal. When its close to the goal it happens that:
Sometimes it goes over the goal, and search continues on
Sometimes it slightly deviates the road map as soon as it approaches the goal.
Do you have any recommendation e.g what kind of attribute to take into consideration?
It is normal that the trajectory goes over the goal (in terms of position), because we always concatenate the whole primitive. However, keep in mind that in the end we only return a pruned trajectory, meaning that states that are behind a state that reaches the goal will be discarded.
What do you mean by deviating the road map? If you meant that it steers significantly near the goal, it is most probably caused by the weights of the heuristic terms. I.e., at some states near the goal region, the ones steering to the goal has lower costs, thus they were picked.
Hey @ge68wug,
have a look at the time_step of the first state that you expect to be within the goal.
If the time_step is below the minimum or above the maximum it will continue. Next I would look at the orientation and check that it’s within the specified interval.
These were at least the problem I encountered with the first algorithms.