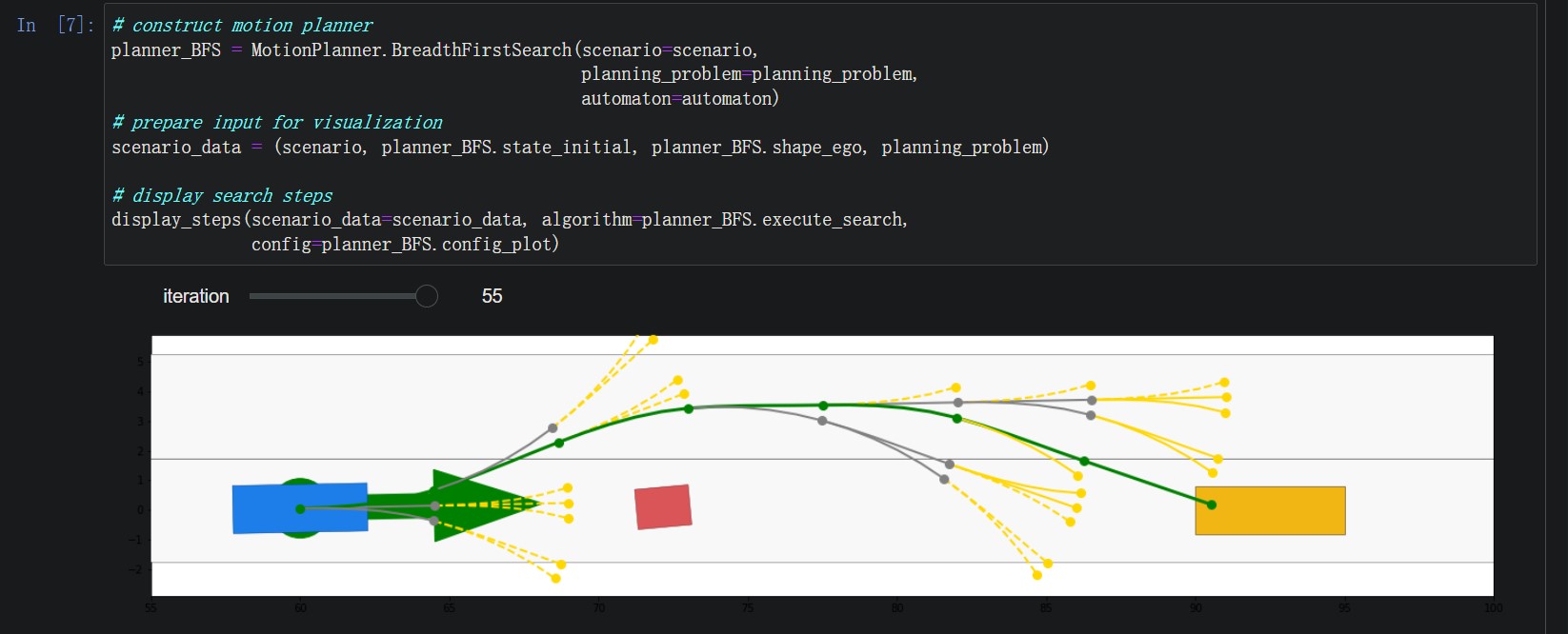
My question is that, why there are only 3 primitives (which lie on the green arrows at first step)? I think there should be 7 primitives in the first step, because the maneuver automaton used for this tutorial consists of 7 motion primitives.
Additionally, I cannot really understand how does the steering angle effect the primitives generation. In my opinion, there are two choice for steering angle for this case, then each side should has one primitive corresponding to with 2 rad steering angle, then there would be 3 primitives in each step instead of 7. I cannot understand why final state can effect the primitives generation. Could you help we to point out where I make the mistake?
The 7 motion primitives generated in this tutorial are for all combinations of possible initial states and final states. For both states, possible steering angles are 0(same direction), 0.2(slightly up), -0.2(slightly down). To be more specific, for initial state with steering angle 0, possible final states are 0, 0.2, -0.2(3 primitives); for initial state with steering angle 0.2, possible final states are 0, 0.2(2 primitives); for initial state with steering angle -0.2, possible final states are 0, -0.2(2 primitives), in total 7 motion primitives.
As for the visulatization of BFS, since the steering angle for each state is realised to be a certain value(eg. steering angle == 0 in initial green dot, -->3 primitives), every node has 2 or 3 possible child- nodes.