Hello,
I am converting OpenDRIVE maps to Lanelet2 using crdesigner.
When testing the converter on multiple maps, I have noticed that there is a geometry that the converter won’t convert.
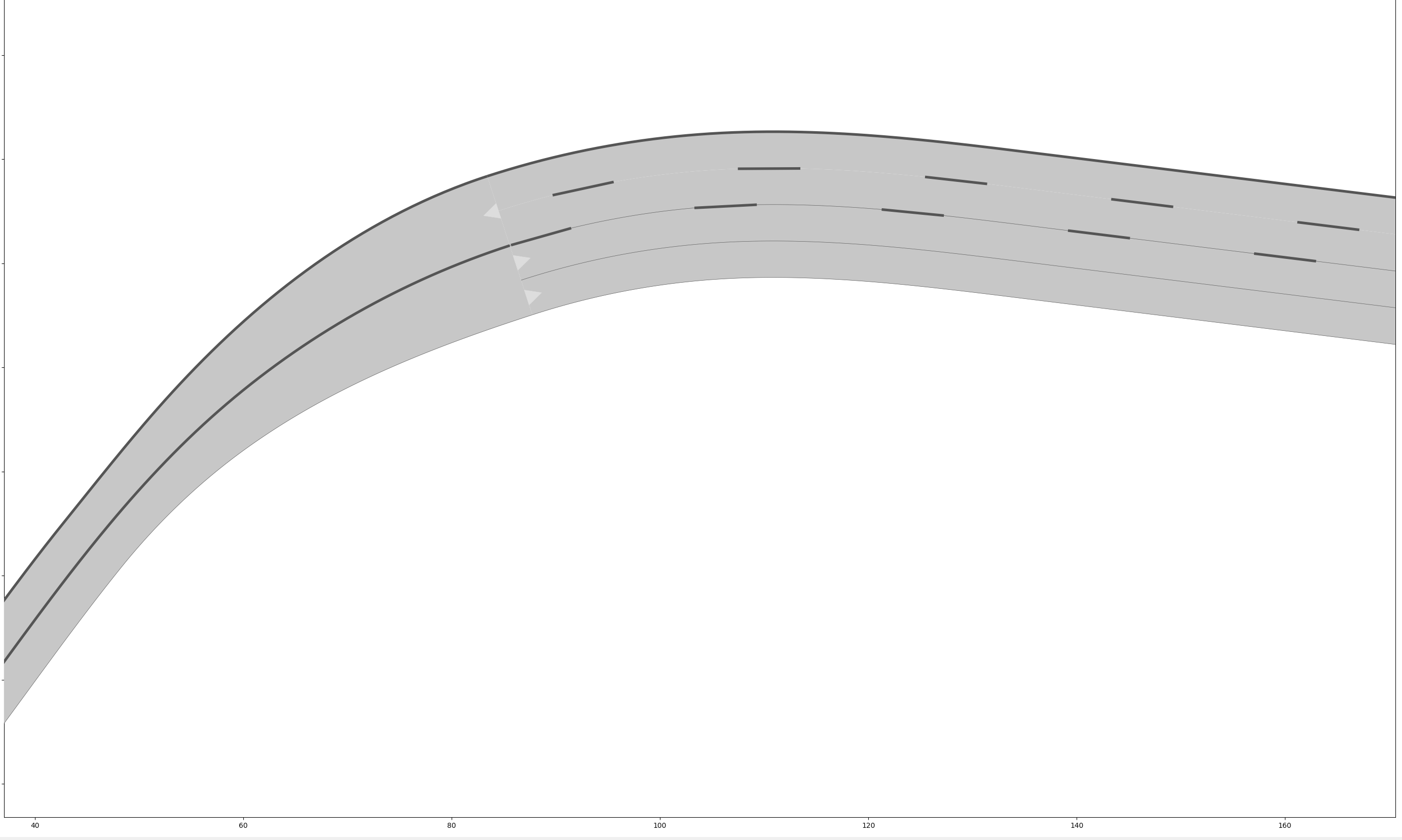
This is the OpenDRIVE image of it:

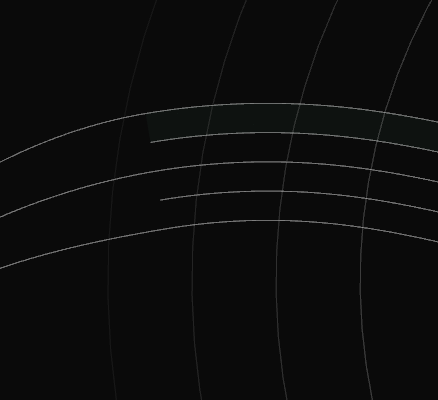
This is the CommonRoad image of it:
This is the Lanelet2 image of it:
From my understanding of Lanelet2 geometry requirements, it should’ve been this:
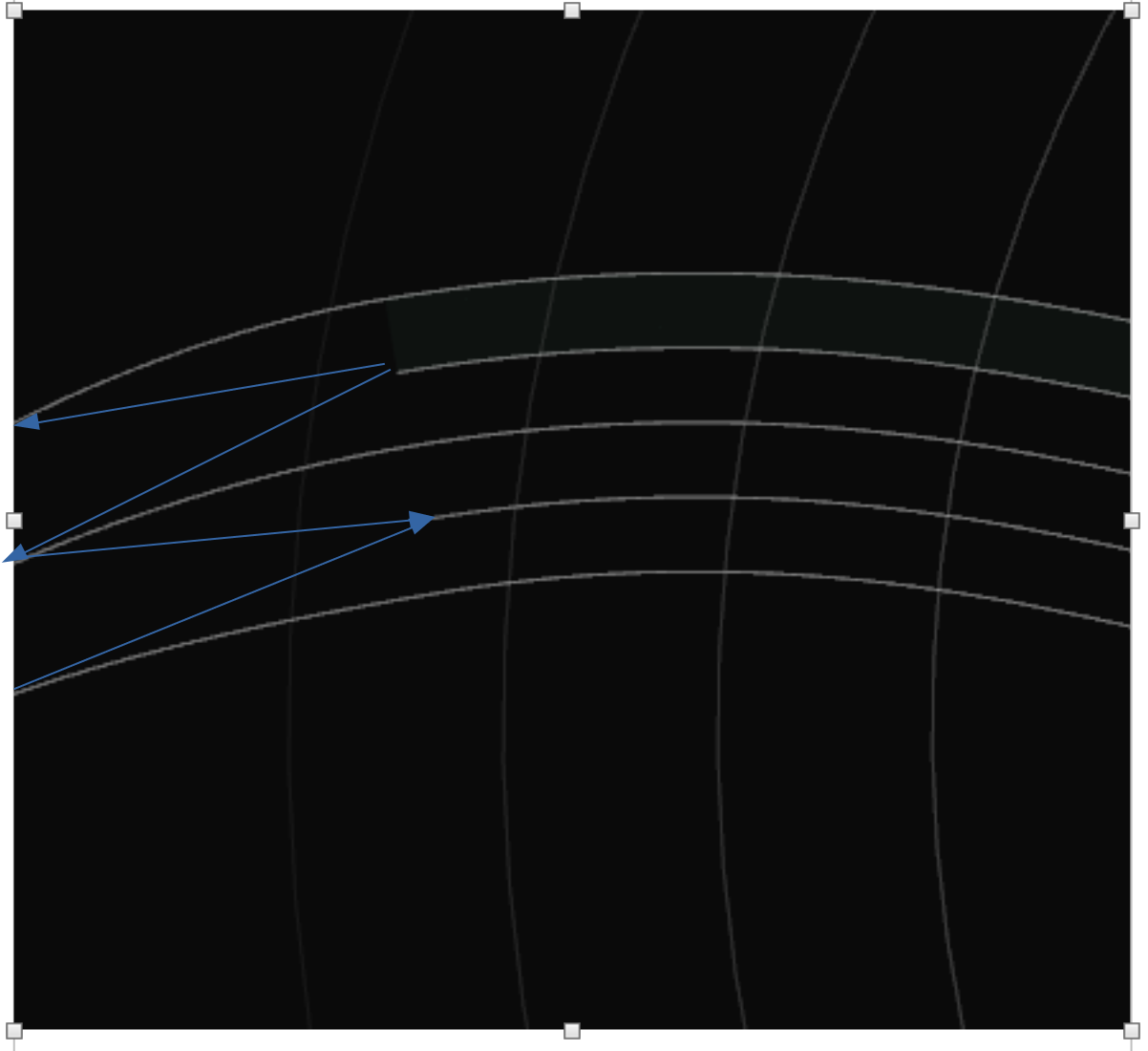
Could I get some clarification on this? This breaks my simulator as the end/start points are technically not connected.