When searching, i get that my algorithm finds solutions, but they are labeled as invalid.
The generated gif looks okay, no collision etc.
What lets a solution become invalid?
What are possible reasons for that to happen?
When searching, i get that my algorithm finds solutions, but they are labeled as invalid.
The generated gif looks okay, no collision etc.
What lets a solution become invalid?
What are possible reasons for that to happen?
Hi, was your solution checked via the solution checker? If so, what is the result of the validation?
The solution checker checks:
valid = all([ solved_all_problems(planning_problem_set, solution), goal_reached(scenario, planning_problem_set, solution), starts_at_correct_ts(solution, planning_problem_set), not obstacle_collision(scenario, planning_problem_set, solution), not boundary_collision(scenario, planning_problem_set, solution), not ego_collision(scenario, planning_problem_set, solution) ])
Hi Edmond,
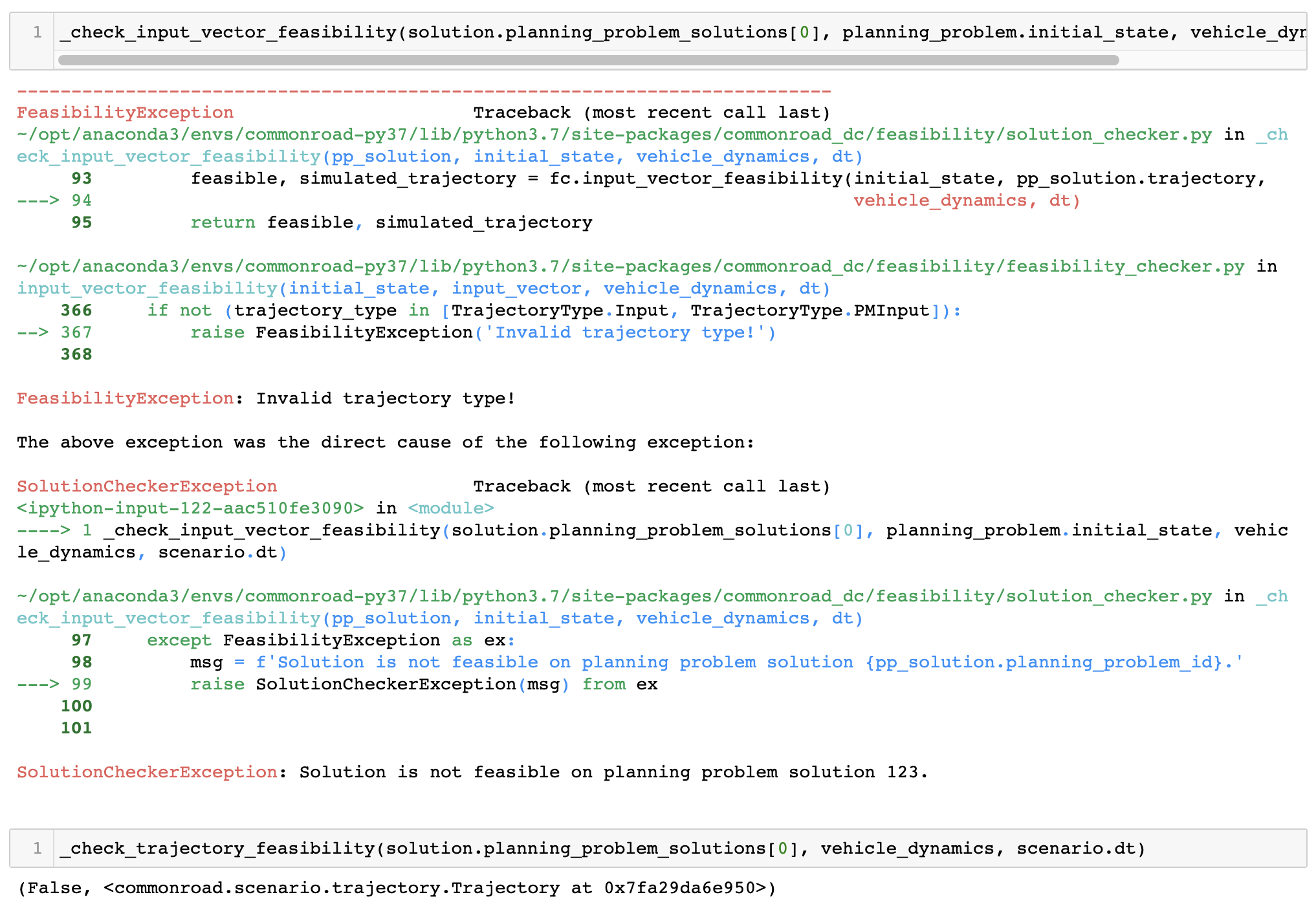
ich checked the solution via solution checker, it has passed but there seems to be a problem with detecting my trajectory through the other function solution_feasible (which includes _check_input_vector_feasibility and _check_trajectory_feasibility), could you give me some suggestions?
This means that your solution is not feasible under the current settings (vehicle model, vehicle parameters, …) You can refer to section VI.C of this paper.