I am trying to apply my own heuristic functions with those provided helper functions from the class ‘SearchBaseClass’. I want to make sure about the intuitions of some concepts.
It would be great if you can depict those concepts with the picture here.
When we talk about “lanelet”, does it mean the segment of one lane or the whole lane?
Adjacent lanelets are defined as “side-by-side” or in the direction of car driving?
How do you define the terms “lanelet center vertices” and “lanelet center line segment” ?
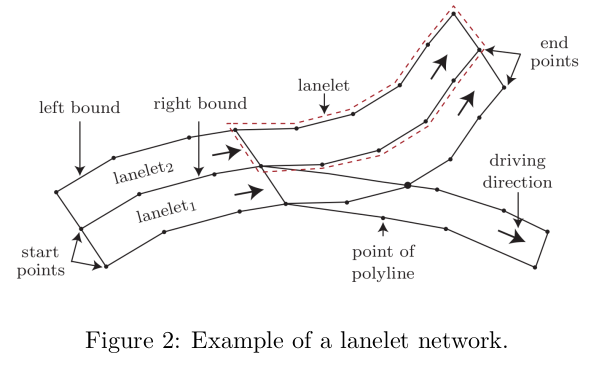
A lanelet is just a pair of left and right bounds modeled with polylines. A typical lane consists of multiple lanelets. In the figure, the right turning lane consists of lanelet 1 and the right turning lanelet.
Adjacent lanes are determined based on if there is a shared road boundary. Each lanelet additionally has an attribute indicating if the left/right adjacent lanelet is in the same driving direction as the current lanelet.
Given the left and right boundary polylines, you obtain the center vertices by summing the two and dividing by 2 to obtain the center vertices.