I am just wondering if there was a huge information change between Scenarios from 2018b to 2020a. Of course Line type, Traffic Lights, etc. were added but I encountered problems with my motion planning when I switched from 2018b to 2020a.
Here is a solution gif of USA_Lanker-1_2_T-1 (2018b):
I was confused about the strange behavior.
Why is a motion planner for 2018b unable to solve 2020a (excluding the new road elements)?
Thank you for your reply.
I am using the Greedy-Best-First Search with Route Planning information in heuristic. I will take a deeper look into priority values that are calculated. Thank you so far.
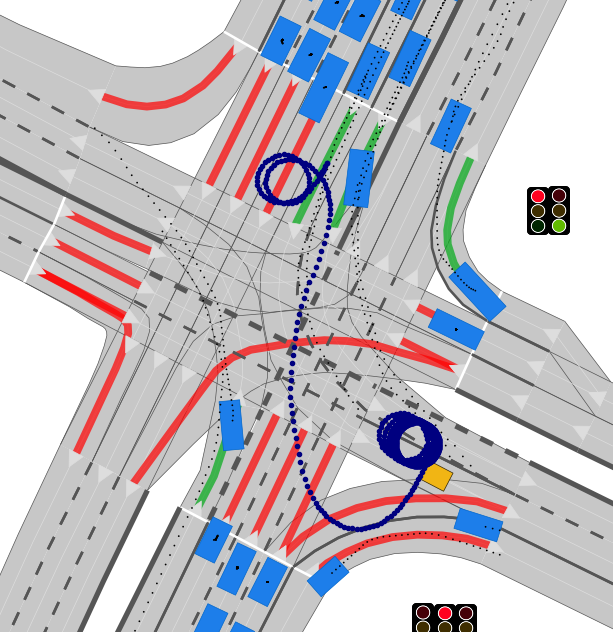
EDIT: Just tried it with the Greedy-Best-First-Search without any modifications and received this. Definitely an interesting trajectory but I would not recommend any vehicle that drives like this
So I debugged the planning and the collision checker and it seems like there is the problem.
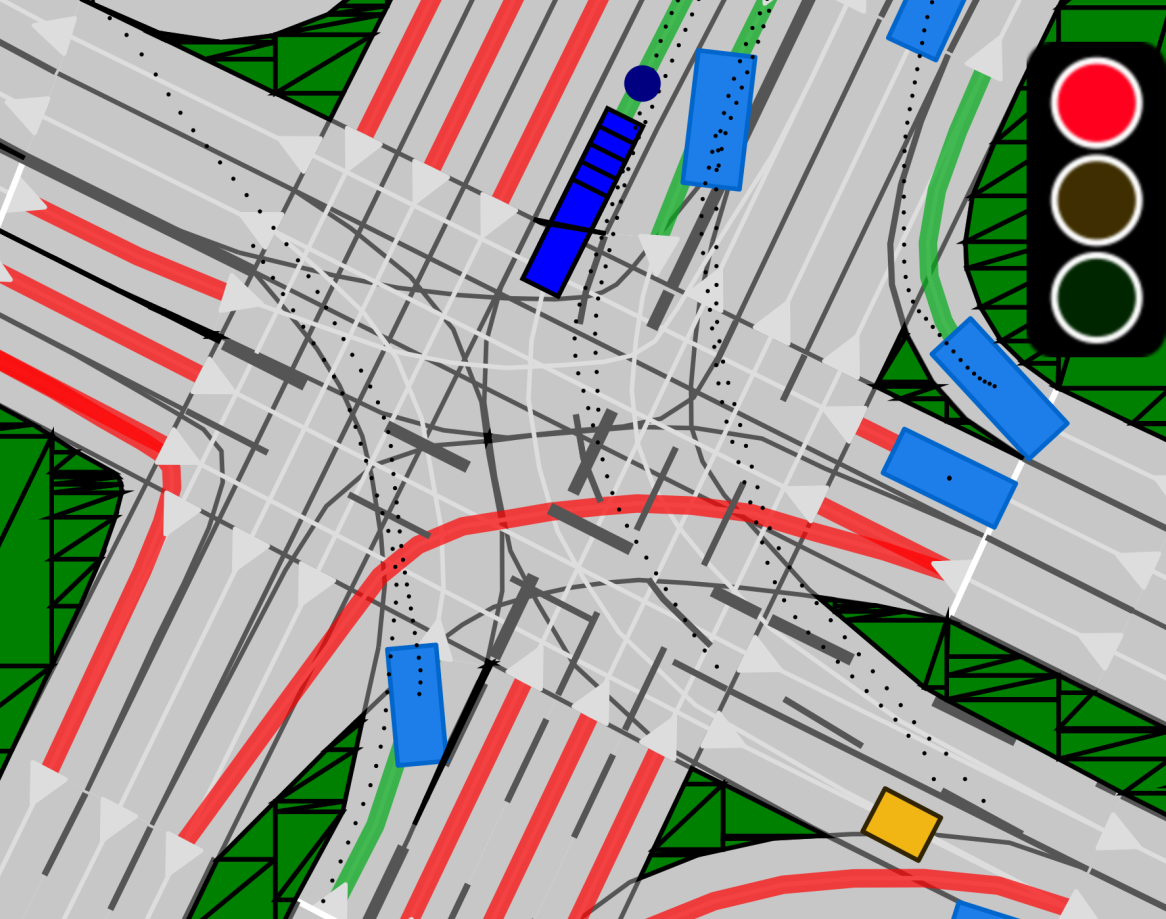
As you can see in the image below, I plotted the ego vehicle collision trajectory (blue) and the colliding object (green) which I got by collision_checker.find_all_colliding_objects(ego_traj_col_obj). The black “line” (which is actually a very small polygon) goes right through the lane and causes this “collision”.
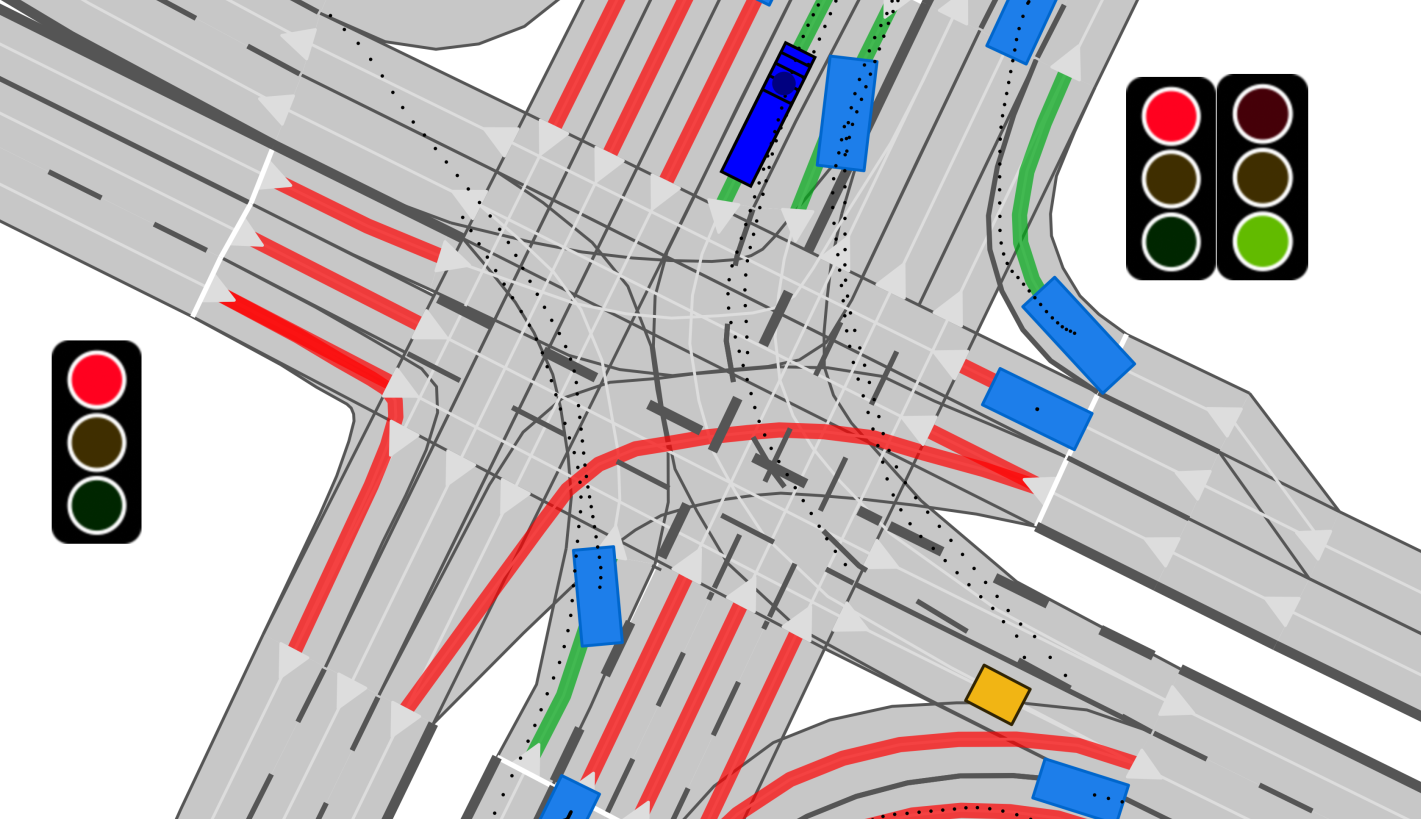
As you can see on the second picture (below), there is no collision before. So it seems like the lanelet network is corrupted here. You can also see a very small space between the lanelets if you zoom in.