Hi!
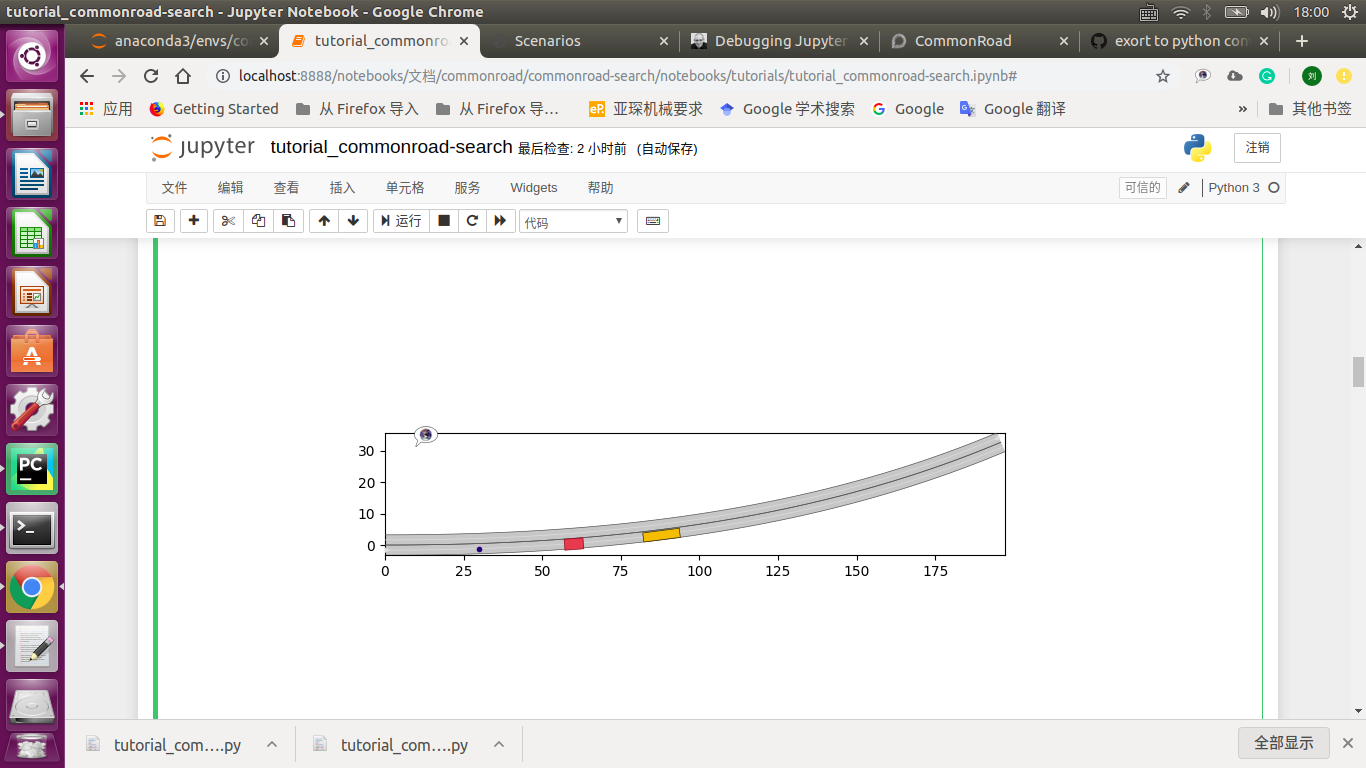
In this scenario ZAM_Over-1_1, apparently there is a rectangular obstacle in front of the goal (siehe Fig 1). But when i run it and print the number of obstacles in final lanet, it prints always “num_obstacles=0”.
And then i set some breakpoints and debug it on the Pycharm, i found that the return values of function “self.get_obstacles” are just the apex of the rectangle. And accidentally all of the 4 points is over the area of the final lanet a bit. In other words, the final lanet does not contain the 4 points of this obstacle. As a result, the function tells that there is no obstacle in the final lanet, which is totally wrong.
So can you just give me an idea, how i can improve this situation and penalize the path always in final lanet and make it to change the lanet?
Thx