FYI, Those are simple scenarios where the ego-car must handle a right turn of different sharpness (90, 60 and 45 deg). I can find solutions to all of them using the GBFS planner, but not bare-bone A*.
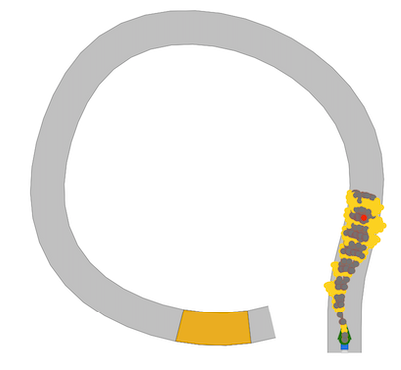
A follow up on this. Thanks to the latest update of commonroad-search, now I can also visualize the progress of the research. This is the situation after about 1240 steps:
I am using the the GBFS planner:
As you can see, it does not seem that the planner makes a lot of progress, and the road is not even that curvy at the beginning. Personally, I expected to see it struggling when with the following turns that are sharper.
Hi Alessio, I was away for two weeks and just came back. Regarding the circular scenario, I believe the bottleneck is the way your heuristic functions are designed. If you are using plain Euclidean metrics, it is very unlikely that you will find a solution to the problem (especially when you have a large set of primitives), since the planner is always looking for primitives that are closest to the goal region. You should reward primitives that go around the circle, which can be tricky to design in this case. One possible solution is to use the reference path leading from the initial state to the goal region (generated by the route planner), and set intermediate goals. The other possible solution is to perform the computation in curvilinear coordinate system, in which case the primitives progressing forward along the lanelet will be rewarded since they are closer to the goal region under this coordinate system. Search under this coordinate system is not implemented yet and is a subject of future work.
As my main goal is to test existing trajectory planners (and not develop them), I might have missed this point. As a matter of fact, my hope was that someone expert in the domain could provide me with sensible trajectory planners to use as test subject
I’ll keep looking around and if you have something for me to test, just let me know!
Thanks for your input anyway. We are currently working on a motion planning library which contains several motion planning algorithms. Unfortunately, this is still in development and will take a few more months before it can be released. I hope you find something useful in the meantime to meet your need.