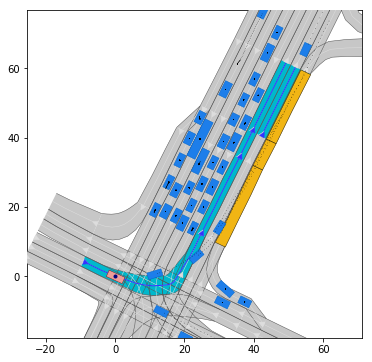
I use code snipts in tutorial_route_planner.ipynb to generate all routes for scenario = ‘USA_Lanker-2_18_T-1’
I got following three pictures, but I found there is one piece of lanelet (the middle short one) ignored.
Are there some special restrictions that disallow that one piece of lanelet, or is it a bug?
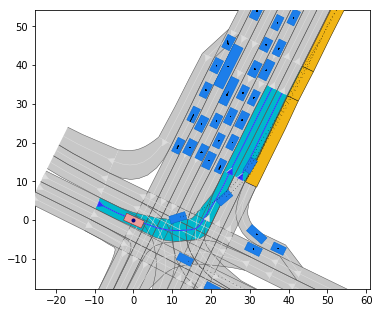
Hi, the routes actually lead to the middle section. The confusion might be caused by the coloring (goal lanelet has yellow color with higher priority). If you plot the reference paths, you can see that there is actually a route for it.
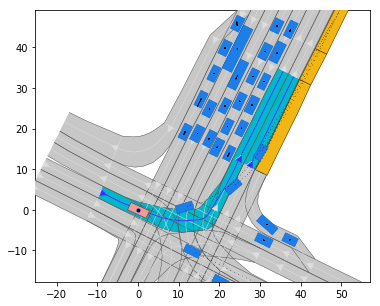
I plot some points based on the routes as well and face the same problem. Therefore, if I give the points I plot higher color priority than the goal region, then it will normally be visualized, right?
Could you give some hints where I can find the color priority number?
In utils_visualization.py, you can comment out line 31 route.planning_problem.goal.draw(renderer) to turn off the visualization of goal lanelet. This way, you can see all the route lanelets displayed as desired.